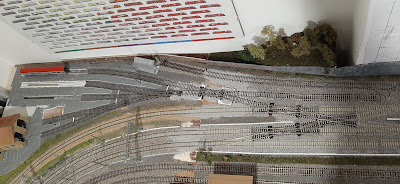
Uno dei lavori più delicati e impegnativi nella costruzione del plastico è l'installazione e configurazione dei servo che muoveranno gli scambi del livello 0 e 1.
Questi piccoli motori nascono per altri usi modellistici: auto e aerei radiocomandati sono il loro normale campo di utilizzo. Da alcuni anni, almeno una decina a dire il vero, con l'avvento del DCC, hanno iniziato a trovare spazio anche sui plastici. In particolare per il movimento degli scambi, potendo simulare il movimento lento degli aghi, oppure per muovere portoni, sbarre ed altro.
Le dimensioni dei servo si sono fatte via via più ridotte, arrivando a misurare pochi centimetri, quindi facilmente occultabili all'interno di edifici o sotto al piano.
Nel mio caso avevo fatto scorta di servo diversi anni fa ed avevo iniziato ad installarli sul precedente plastico.
Anche in questo nuovo lavoro, i servo muoveranno gli scambi del livello 0, al momento non ho tolto la molla di richiamo degli scambi peco, per cui viene meno il movimento lento. Valuterò se apportare questa modifica o puntare alla sicurezza.
Oltre al movimento degli aghi, il servo comanda anche un microswitch per la polarizzazione dei cuori degli scambi. Montato sul supporto in posizione adeguata, lo switch viene azionato dalla leva del servo a fine corsa.
La gestione dei servo è demandata ai decoder specifici, su questo modulo è un decoder Oscilloscopio.it modello DAC-A200
Dal sito oscilloscopio.it
Questo decoder e' stato pensato per unire un basso costo ad una grande flessibilita' di funzionamento. Viene impiegato un microcontrollore a basso costo per implementare tutte le funzioni e pochi componenti standard di larghissimo uso e basso costo. Alla semplicita' dell'hardware corrisponde una completezza delle funzioni firmware che consente il comando di praticamente tutti i servocomandi presenti sul mercato.

Caratteristiche dell'hardware
● Ingresso DCC optoisolato, max 10mA di carico sulla linea DCC
● Ingresso di potenza separato 7-18VAC o 7-24VDC
● Singola alimentazione per ogni servocomando con LM7805
● LM7805 per ogni servocomando usato come limitatore di corrente e fusibile elettronico
● 4 o 5A di corrente totale erogabile a seconda del ponte a diodi che si monta
● Fino a 700mA continuativi per ogni servocomando, picchi da 2A
● 3 tasti + 1 led per programmazione (parziale) senza DCC
● PCB singolo strato
● Spazio per montare dissipatori sugli elementi di potenza (LM7805)
● Dimensioni 80x60mm
● Gestione dell' acknowledge per binario di programmazione
Caratteristiche del firmware
● Decoder per accessori standard, indirizzo da 1 a 510 (9 bit)
● Programmabile sul “main track” o sul binario di programmazione
● Ogni uscita del decoder controlla un singolo servocomando, ultima uscita non usata
● Programmazione CV per gestione posizioni dei servocomandi
● Programmazione CV per gestione velocita' di attivazione
● Programmazione del set di CV 1-128 o 513-640 in modo trasparente
● Programmazione dell'indirizzo DCC con tasti e LED
● Programmazione della posizione servocomandi con tasti e LED
● Modalita' “DEMO” attivata alla mancanza del segnale DCC
● Impulso di comando al servcomando di durata 500-2500us
● Segnale di comando ai servocomandi generato in HW, nessuno periodo morto nel funzionamento del decoder
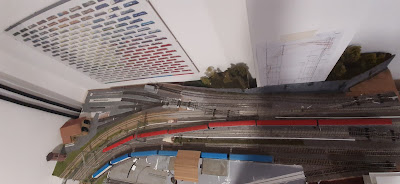
Il gran lavoro consiste nel montare il servo con il suo supporto, lo switch, collegare tre spezzoni di filo con relativi connettori, montarlo in posizione verificando il movimento degli aghi e programmare il decoder affinché il servo copra la corretta escursione per muovere gli scambi e attivare lo switch.
Un lavoro lungo e delicato, sono al quarto scambio del primo lotto di 7. Ne mancano altri 11 solo in questo modulo e in quello della rimessa.
Ne avrò per un bel po'.